
RepVGG论文与代码阅读
论文:RepVGG: Making VGG-style ConvNets Great Again
作者:Xiaohan Ding, Xiangyu Zhang, Ningning Ma, Jungong Han, Guiguang Ding, Jian Sun
录用情况:CVPR'2021
第一作者单位:Beijing National Research Center for Information Science and Technology (BNRist); School of Software, Tsinghua University, Beijing, China
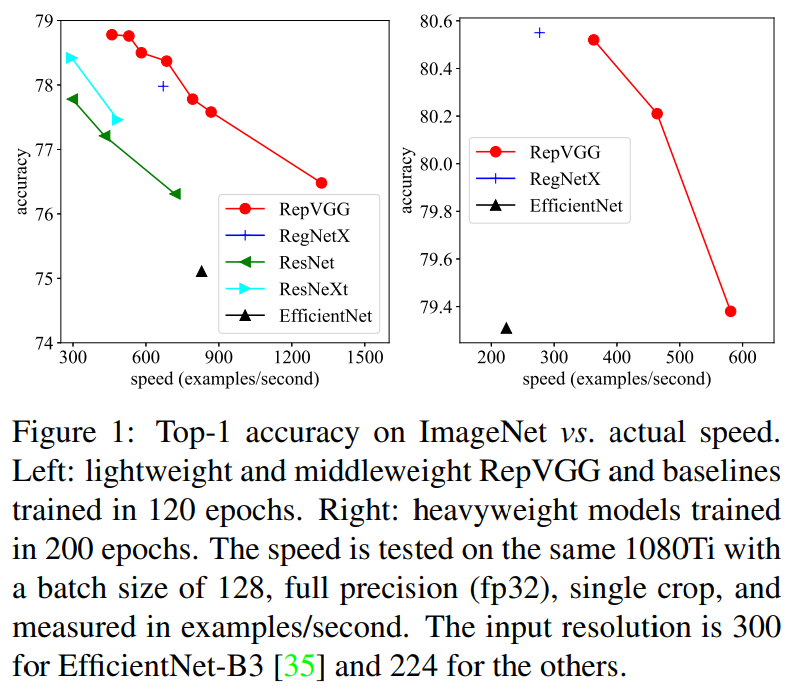
本文借助重参数化技巧,提出了一个在训练时多分支,而在推理时为类似于VGG的直筒形网络(3x3卷积+ReLU堆叠成的基本块),命名为RepVGG。这是第一次一个简单的模型在ImageNet上获得了80%以上的top1准确率,并且直筒形状的结构让RepVGG有着很高的计算密度与推理速度,相比于EfficientNet和RegNet有更好的性能与速度的折中。作者本人在知乎上的稿子。代码仓库。
方法
为什么需要多分支的网络
我们不否认直筒型的、深层的网络理论上具有足够的学习能力,但是很难训练;从GoogLeNet、ResNet起,大家就尝到了多分支网络的甜头,对于shortcut连接,一些普遍的解释为:
- 获得了多种浅层模型的集成的效果,具体地说,\(n\)个有shortcut的block,相当于\(2^n\)个网络的集成;
- 在非线性层存在的前提下,复杂的连接,增加了模型的非线性;
然而,这种多分支结构也引入了缺陷:
- 多分支使得显存消耗增加;
- 复杂的模型降低了并行度;
作者指出,尽管一些模型具有较低的FLOPs,但是因为并行度不够等原因,计算密度低,模型在推理时的速度慢。
模型重参数化
本文的重参数化,侧重于“使用先前的模型结构的参数,构造新结构的参数,使得模型结构修改前后,对于数据流的作用是等价的”,即找到一种参数的代数变换,使得\(x+g(x)+f(x)=h(x)\);
作者在文中强调了这个工作与DiractNet的区别:DiractNet的重参数化是用得到的参数计算另一个数学表达式来优化。笔者后续也会更新一些别的重参数化的论文阅读。
Winograd Convolution
这是一种对于步长为1的3x3卷积的加速算法,对于\(F(2\times 2, 3\times 3)\)(表示输出尺寸为2x2,卷积核尺寸为3x3的一卷积运算),考虑每一个输出的每一个位置来自一对长度为9的向量的内积,标准卷积方法需要2x2x3x3=36次乘法计算,而winograd方法通过观察到im2col之后的矩阵存在大量重复元素,设计算法将乘法次数减少到16次。这个slide清楚地讲述了在\(F(2,3)\)上的算法,又如何扩展到\(F(2\times 2, 3\times 3)\),进而再扩展到更大尺寸,更多通道上的3x3步长1卷积。
作者整个模型都使用3x3,stride=1的卷积,旨在利用上这种加速算法。
训练时块结构与重参数化方法

作者为每个块设计了两条额外分支,在每个块的最后(图中没有画出来)的是ReLU非线性层,不参与后续的重参数化。在推理前,目的时将3个分支的参数合并到单分支的3x3卷积中去。

上图主要展示了,如何将1x1卷积和原始输入构造为具有等价输出的3x3卷积,下面的公式化描述介绍了如何“吸BN”。

在实现时,注意的第一个细节是,将1x1卷积转化为3x3卷积时,除了给卷积核pad 0之外,图像的padding也要减去\(\lfloor \frac{\text{kernel size}}{2}\rfloor\),这才使得结果等价。
另一个细节是,由于作者穿插设置了部分块使用分组卷积(后面的整体架构一节中会讲到),对于3x3卷积和1x1卷积的分支,在重参数化时没有什么需要对此特殊处理的,对与将恒等映射改写为3x3卷积的情况,则需要注意分组卷积的组数。
分组卷积,就是将\(C_1\)维的输入tensor和\(C_2/g\)个\(C_1\)维卷积核分成\(g\)个\(C_1/g\)维的卷积,得到的\(g\)个\(C_2/g\)的tensor在channel维度拼接到一起。因此,对于恒等映射等价的第\(i\)个卷积核,应该只在\(i ~\text{mod}~ g\)维的3x3的矩阵的中心为1。
对于一个RepVGGBlock,作者定义了switch_to_deploy方法,在训练后,推理前,遍历网络并对所有RepVGGBlock调用该方法:
1 | def switch_to_deploy(self): |
1 | def get_equivalent_kernel_bias(self): |
1 | def _fuse_bn_tensor(self, branch): |
整体架构
作者配置架构的原则就两个:简单的根据经验设置+减少参数;

上表展示了不同分辨率的特征图有几个block,以及每个block的通道数,其中\(a, b\)是缩放因子,有\(a<b\),stage1个stage5都只有一一个block的原因是为了减少参数量。
可选的,可以穿插地将部分block的groups设置为一个全局常数,比如2或者4。相邻的block都使用分组卷积,可能会导致通道内信息交换受限。
最新的代码中,作者添加了RepVGGplus,使用了更深的层数,辅助头,以及在非线性层之后使用SEBlock。
实验
这一部分作者想强调的点在于,他们使用了Pytorch官方教程中简单的数据增强,随心的模型配置,就让推理时的模型获得了相比于同样训练设置下参数相近的ResNet, EfficientNet, ResNeXt等更快的推理速度和更好的性能(尽管该模型往往参数量更大,FLOPs更大,但速度却最快)。
在消融实验中,作者不仅证明了3个并行分支,一个不能少,并且,通过将ResNet中的Block替换为RepVGG Block,证明了性能的优越并不是靠在训练时堆参数得到的。
此外作者还刷了刷Cityscapes的点。
实验结果的细节见论文,并且在仓库中,作者更新了最新的模型配置与性能(在ImageNet上最高刷到了84.06%)。
总结
本文提出的结构重参数化技巧让VGG风格的模型“再次伟大”,本质上还是利用数学上的等价转换将训练好的复杂模型简化。除了卷积,其他算子(如MLP)有没有响应的简化方法?该模型虽然速度快,适用于满载荷的业务场景,但是较高的FLOPs也将带来更多功耗,这在各种终端中也是至关重要的。